Damage Recovery in Legged Robots
Contributors
Anirudh Aatresh, Dr. George Council, Dr. Shai RevzenSummary
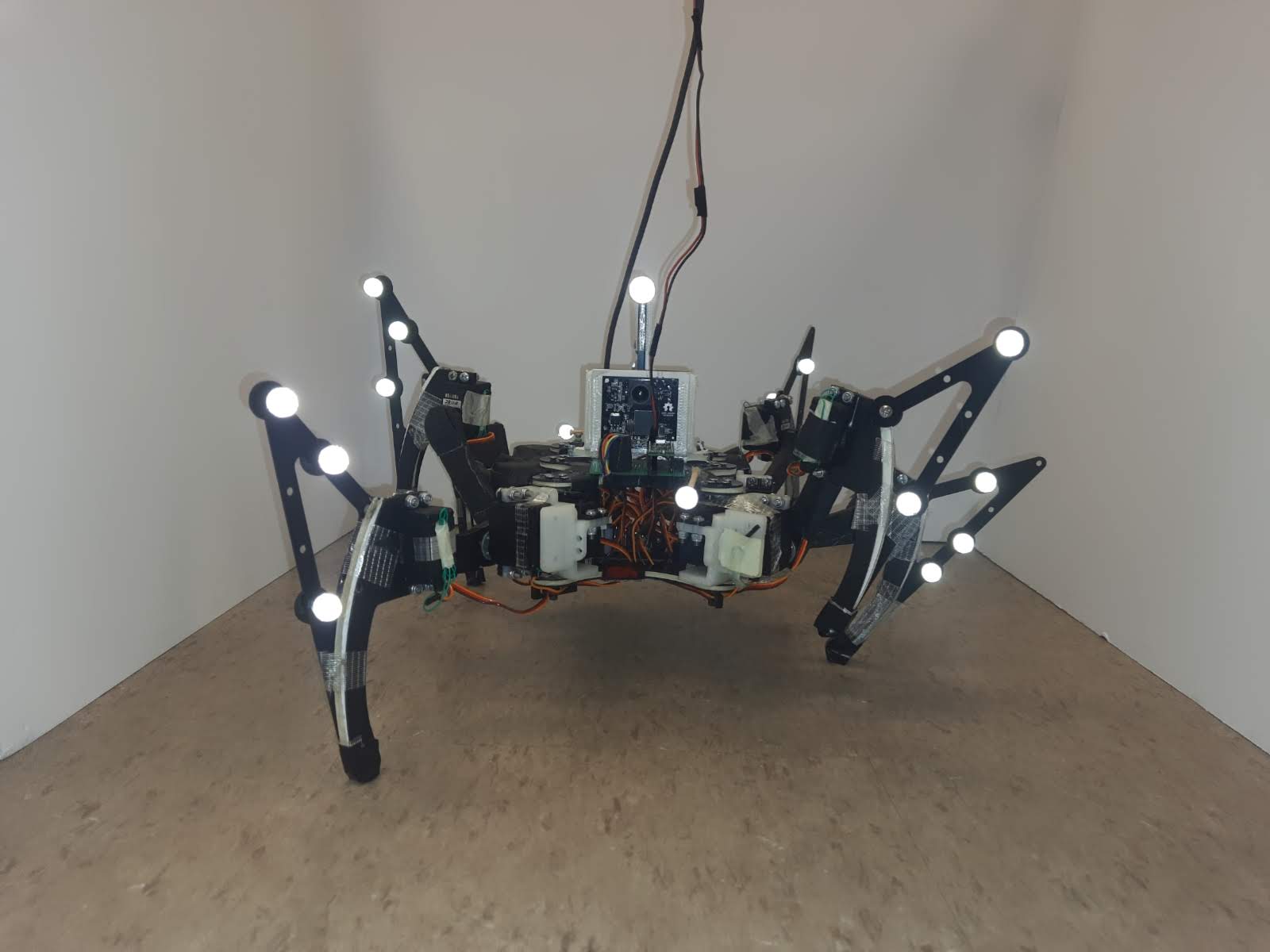
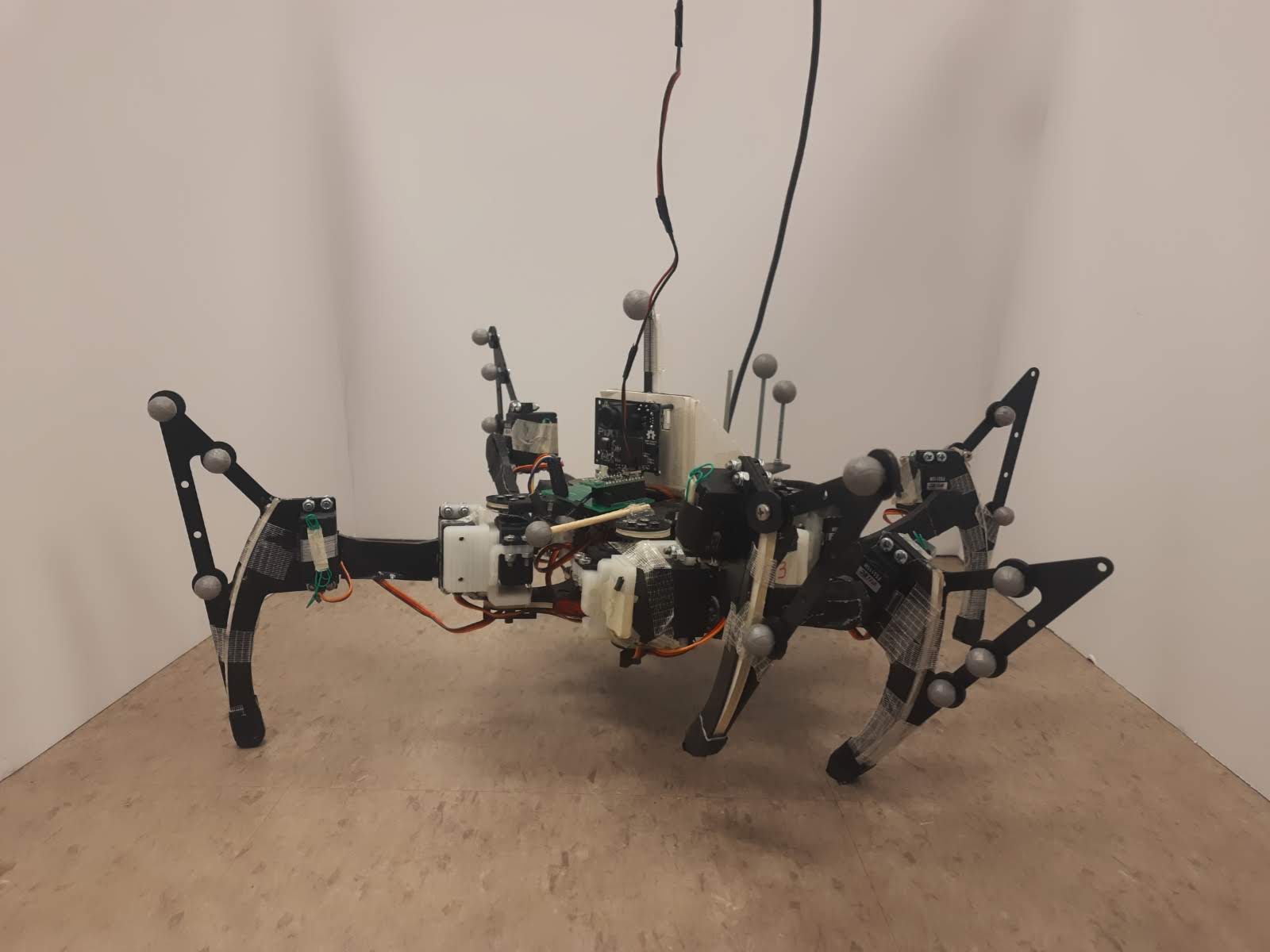
The ability of a robot to autonomously recover from damage, such as changes in morphology or range of motion of actuators, is essential for it to realize genuine autonomy in unstructured, unpredictable, and isolated real-world environments. In scenarios where robots are not immediately reachable by humans for repair (ex., a planetary rover), a damaged robot that recovers autonomously to continue working towards its mission objectives will be more reliable and cost-effective. In this project, we attempt to recover a hexapod's movement after damage to its limbs. We detect damage by having the robot look at four beacons in its field of view on the horizon and treat their relative movement as observation functions that characterize robot movement. Once the damage is detected, we solve an optimization problem over a space of redundant constraints that define the desired movement of the robot and find optimal gait parameters for an alternate gait that counteracts the damage that has occurred and preserves its motion. The inspiration for this work is from the thesis of a former Ph.D. student, Dr. George Council, and this project is currently in progress.