Automatic Object Detection with Side-scan Sonars
Contributors
Anirudh Aatresh, Faheema AGJ.
Summary
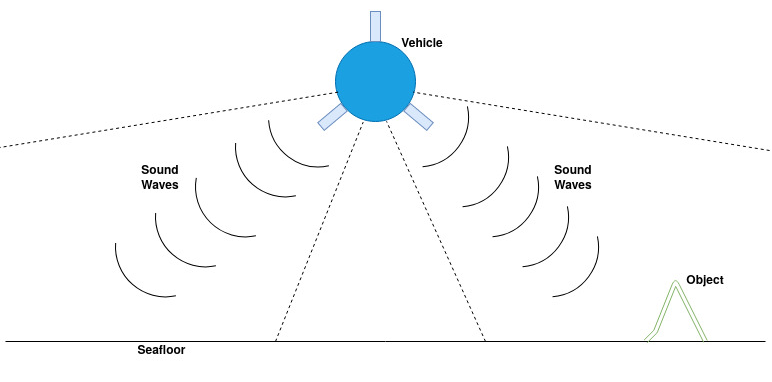
Automatic object detection is among the main perception modules of robotic systems. In many applications, robust object localization and detection can make a massive difference between success and failure. A side-scan sonar (SSS) is an acoustic sensor capable of depicting the sea floor with incredible detail. The use of SSS sensors is to form images (also known as waterfall images) of the sea floor, which can then used to detect objects of interest. In this project, we have focused on using SSS for search and rescue operations to detect ships, planes, drowned bodies, amphora, torus, and pipes.
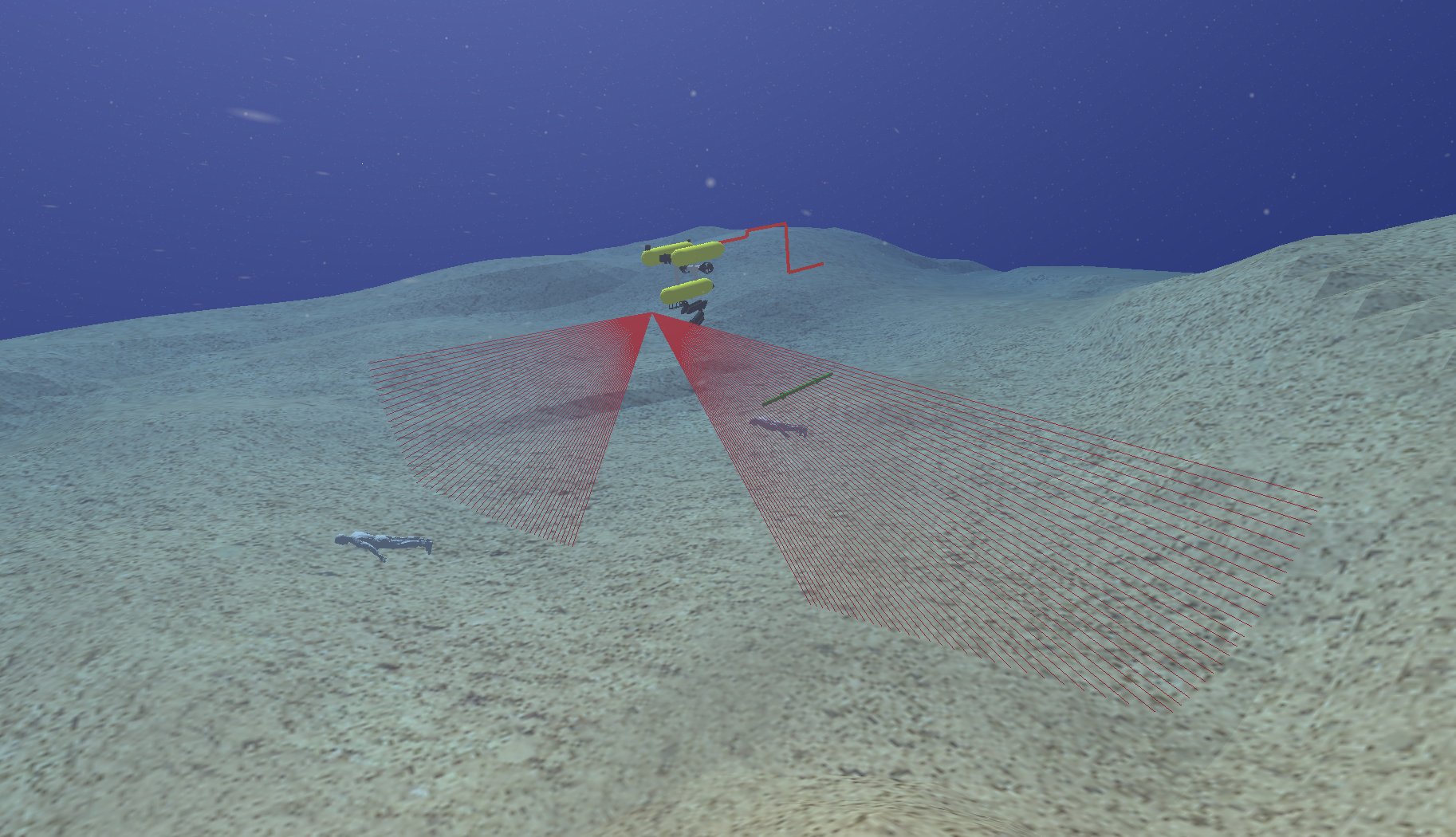
Manual detection of these objects is laborious and error-prone as they are sparsely present, and reconstructed images are very high resolution. Manual identification under these conditions may decrease the percentage of accurate detections due to operator fatigue, which is not desirable given the seriousness of a search and rescue operation. We therefore studied and compared two practical deep learning object detection algorithms - Faster RCNN and EfficientDet, for real-time object-of-interest detection. However, due to the non-existent nature of side-scan sonar data in the research domain, synthetic ”realistic” data generation is required to train a robust target detector on SSS images. Hence, we first created an SSS sensor for the UWSim simulation environment to generate realistic-looking synthetic SSS waterfall images and combined these with images generated from a generative adversarial network (GAN) trained on existing SSS images. This collated dataset was used to train the object detection algorithms, and their performance was analyzed and compared.
This project was my Bachelor's thesis.