Planning Around Plants
Contributors
Anirudh Aatresh, Johnson Zhong, Dr. Dmitry BerensonSummary
Robot gardening with a manipulator often involves scenarios where the arm needs to move through plants for the end effector to reach its target position without damaging them. The success of rapidly exploring random trees (RRT) motivated us to develop a modified bi-directional RRT framework for a 7 DOF arm, capable of gently deflecting plants out of its way as it reaches a goal configuration. In our simulation experiments in PyBullet, we created a compliant plant structure consisting of multiple stems and branches. In addition to collisions with the arm's environment, any deflection of a plant structure beyond the preset limit was considered a constraint violation in the planning process. In other words, collisions between the arm and plant bodies were allowed, but deflections of plant structures beyond the preset limit were not allowed. We defined a cost function metric to assess this method. Our experiments with various plant-based environments showed that our approach yields the lowest cost in each environment compared to benchmark techniques. Moreover, our method was seen to be 1.5 times more efficient.
We also extended this approach towards planning under uncertainty by considering planning in a stochastically generated multi-world environment. Our results showed that our method could produce suitable paths through plants to reach their destinations in various complex plant environments.
Useful links
Gallery
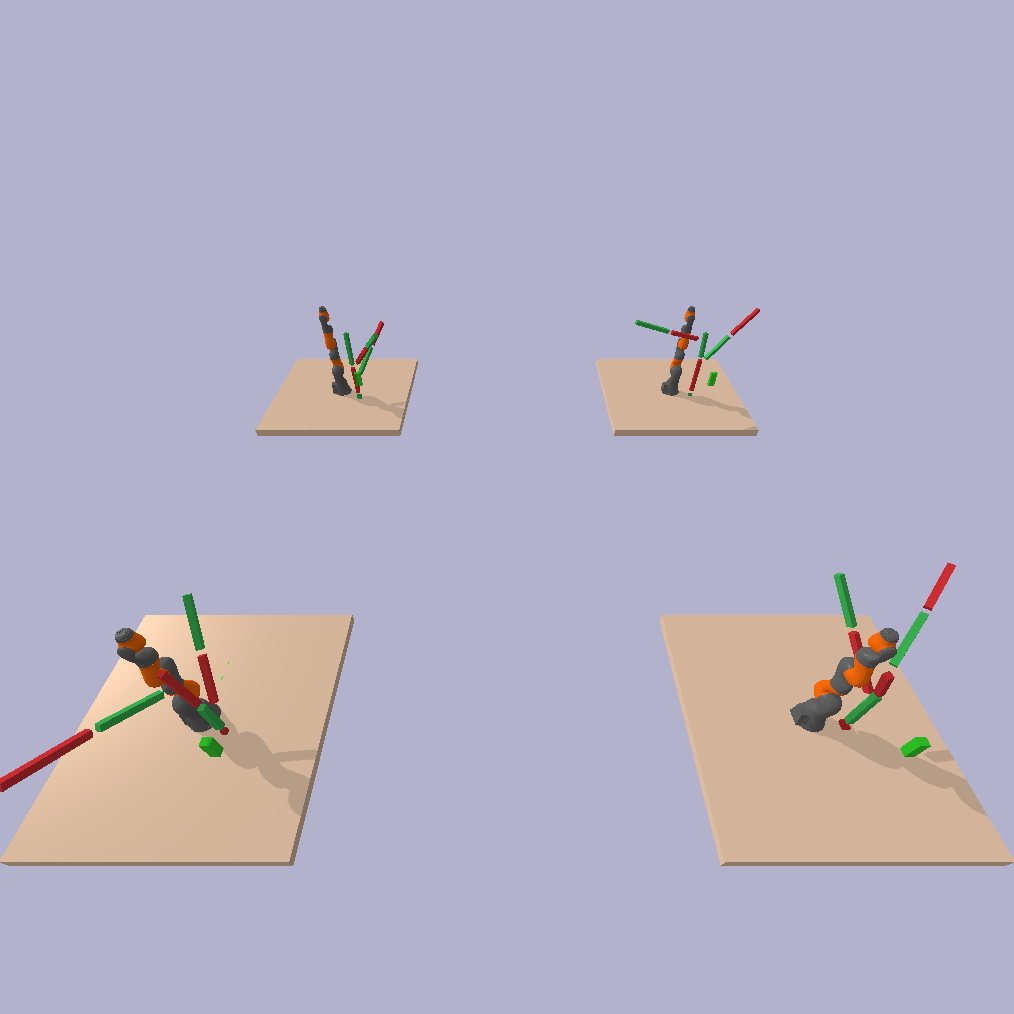
Planning around plants in a multi world scenario with a 30% strictness policy
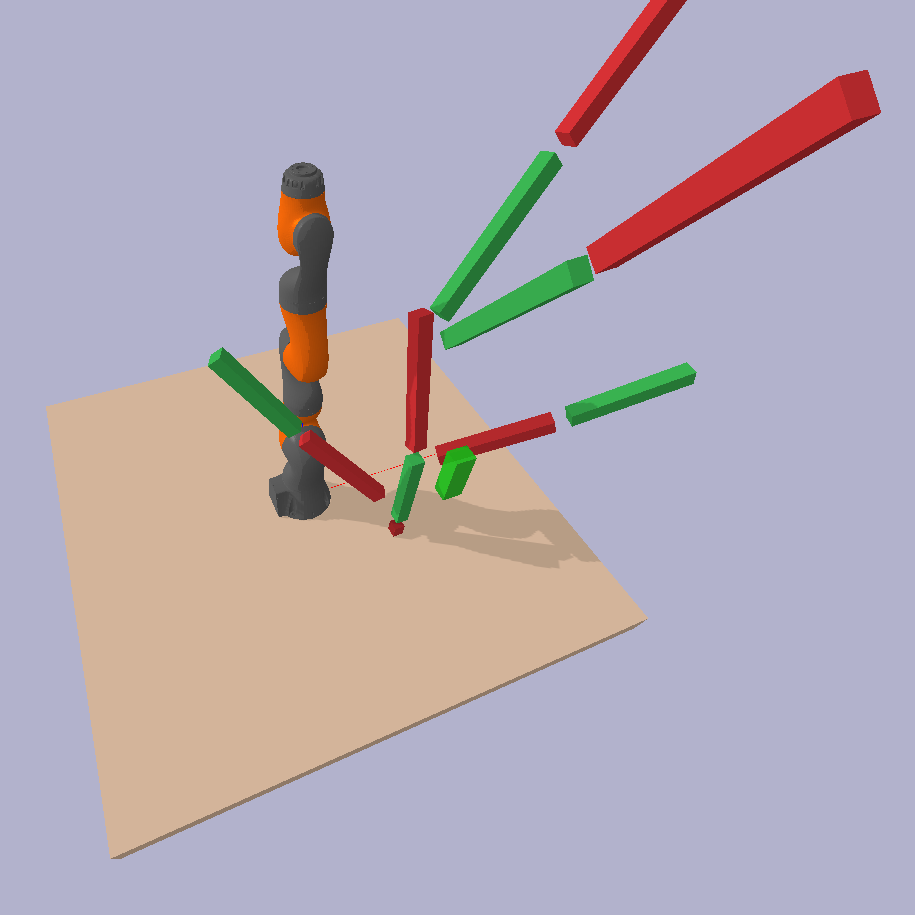
Planning around tall plants
Planning around plants in challenging environments
Planning around plants with multiple branches