Robotics Systems Lab
Note: New Pages describing the two projects shown here: SLAM-based autonomous mobile robot and computer-vision-based manipulation, can be found through the following links:
Contributors
Anirudh Aatresh, Devansh Agrawal, Shreya Phirke, Christopher Nesler, Joshua Roney.Summary
The Robotics Systems Lab (ROB 550) is a practical lab course offered by the Robotics Institute of the University of Michigan. This course covers a graduate-level introduction to concepts in practical robotics. It is divided into two parts - BotLab and ArmLab, where we work in teams to learn and implement practical concepts such as PID control, SLAM, kinematics, and object detection.
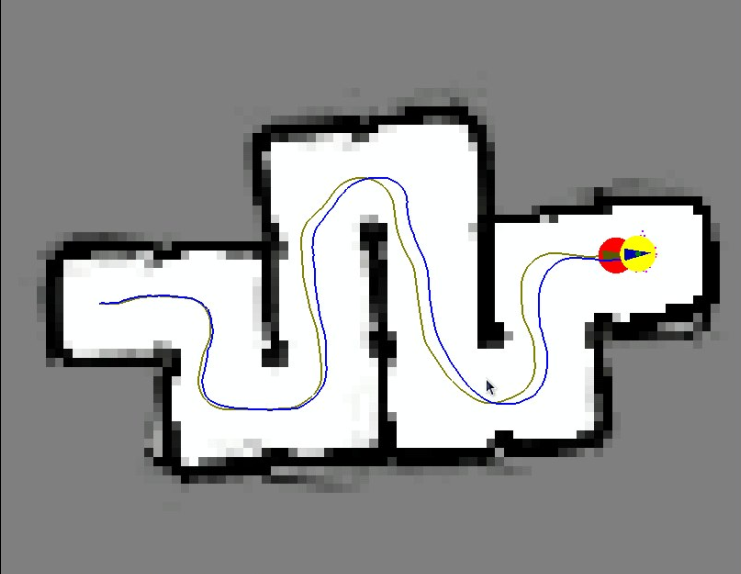
In BotLab, we worked towards building and programming a 2 DOF mobile robot equipped with a Beagle Bone Blue board for low-level control and a Raspberry Pi 4 for high-level control and simultaneous localization and mapping (SLAM). This robot performed position and velocity control given appropriate set points of operation. We also worked towards creating a framework that performed SLAM using a 2D LIDAR and Monte Carlo localization. This framework allowed our robot to plan and explore its environment autonomously. A more detailed explanation of this project can be found in a newly created page here.
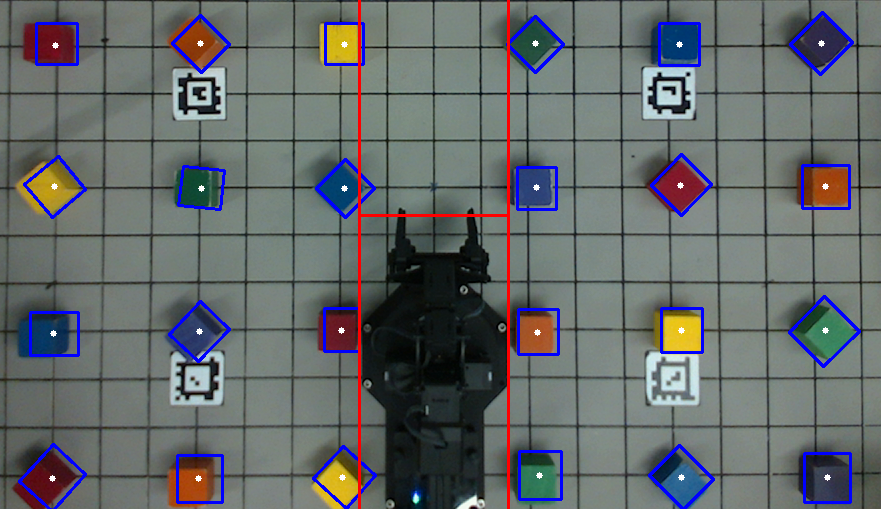
In ArmLab, we worked towards building a robust manipulation system by implementing forward and inverse kinematics for a 6 DOF robot arm and used an overhead RGBD camera to perform computer vision tasks such as block color identification and pose detection. This system could perform autonomous pick and place tasks, sorting, and stacking operations of objects of interest that were identified using the vision system. A more detailed explanation of this project can be found in a newly created page here.
Gallery
Botlab (ROB 550 course)
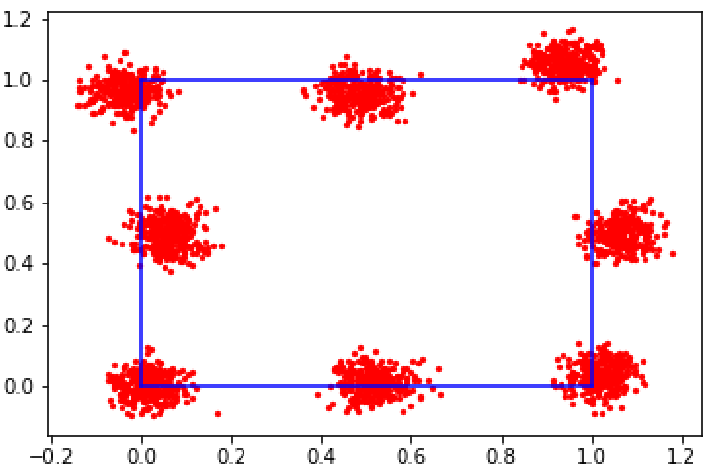
Fig 3. - Visualization of 300 particles at regular intervals in the Monte-Carlo localization process. Armlab (ROB 550 course)
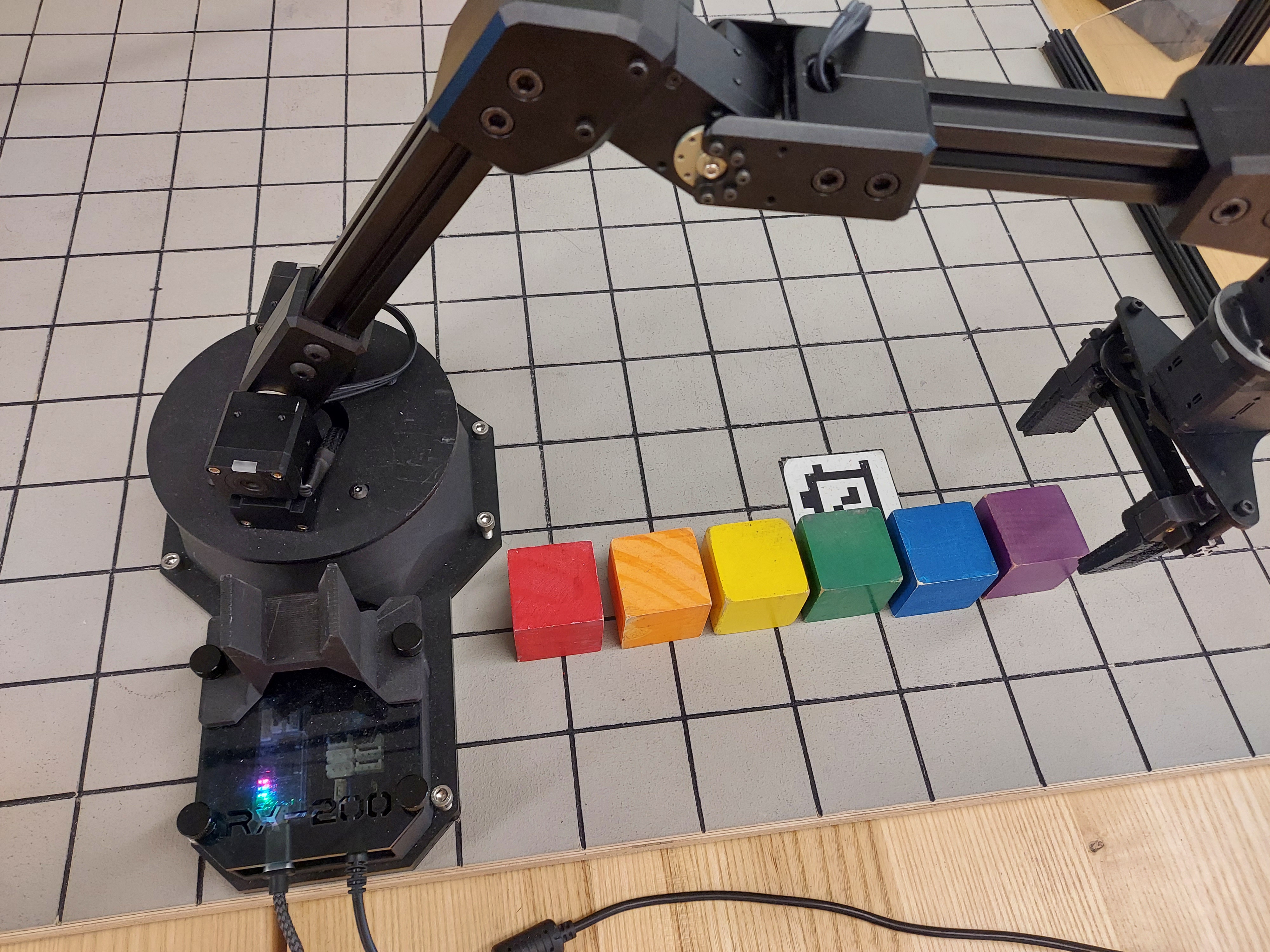
Fig 4. - Sorting and arrangement of randomly placed large blocks based on color and size. 
Fig 5. - Sorting and arrangement of randomly placed small blocks based on color and size. 
Fig 6. - Stacking of small blocks in order of color.